丂ALFAT chip
丂ALFAT chip
丂ALFAT chip
丂ALFAT chip
- 仠 PIC 儅僀僐儞偱CF乮僐儞僷僋僩僼儔僢僔儏乯偱惂屼偟傛偆両
- 埲慜丄俹俬俠儅僀僐儞偵壏搙丒幖搙僙儞僒傪愙懕偟丄俴俠俢儌僕儏乕儖偵昞帵偡傞憰抲傪丄 僩儔儞僕僗僞媄弍偺俀侽侽俁擭侾俀寧崋偱徯夘偟偨偺偱偡偑丄壏搙丒幖搙傪婰壇偱偒側偔偰丄 偪傚偭偲晄枮懌偱偟偨丅
偦偙偱丄GHI Electronics幮偺ALFATchip傪梡偄偰丄應掕僨乕僞傪俠俥乮僐儞僷僋僩僼儔僢僔儏乯 偵曐懚偡傞偙偲偵偟傑偟偨丅
愭偢偼丄僸儏乕儅儞僨乕僞偱斕攧偟偰偄傞ALFATchip偺昡壙儃乕僪FAT-002傪巊偭偰丄PIC儅僀僐儞偱 CF傊偺僨乕僞彂崬傒偵僠儍儗儞僕偟傑偟偨丅亂僾儘僌儔儉侾亃
ALFATchip媦傃FAT-002偵偮偄偰偼丄 僸儏乕儅儞僨乕僞偺儂乕儉儁乕僕傪嶲徠偟偰偔偩偝偄丅
偦偟偰丄壏搙丒幖搙傪昞帵媦傃應掕寢壥傪俠俥偵婰壇偡傞僾儘僌儔儉傕姰惉偟傑偟偨丅亂僾儘僌儔儉俀亃
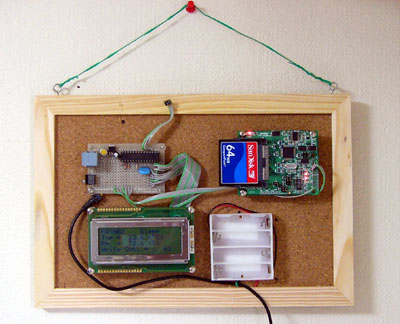
暻妡偗壏搙丒幖搙寁偱偡両乮揹尮傪姡揹抮偐傜5.6V弌椡偺AC傾僟僾僞偵曄峏偟傑偟偨乯
俴俠俢昞帵僷僱儖偺僋僀僢僋僞僀儉丒儉乕價乕
崱屻偺壽戣偼丄俠俥偵婰壇偝傟偨僨乕僞傪夝愅偡傞僾儘僌儔儉偺嶌惉
- 仠 夞楬恾
- 夞楬恾偼壓恾偺捠傝偱偡丅愒榞撪偑FAT-002儃乕僪偱丄僩儔儞僕僗僞媄弍偱徯夘偟偨夞楬偵捛壛偟偨晹暘偱偡丅
亂夝愢亃PIC16F873偲ALFATchip偲偺愙懕偵偼丄I2C傪巊偄傑偟偨丅
ALFATchip偼丄UART(僔儕傾儖億乕僩乯丄SPI丄I2C偱愙懕偡傞傛偆偵側偭偰偄傑偡偑丄 崱夞偼I2C傪梡偄偰PIC儅僀僐儞偲愙懕偡傞偙偲偵偟傑偟偨丅
I2C偱愙懕偡傞応崌偵偼丄忋恾偺傛偆偵丄SCL媦傃SDA偺I2C梡儔僀儞偺懠偵丄 I2C-DATARDY偲I2C-BUSY儔僀儞傪僴儞僪僔僃僀僋梡偵愙懕偟傑偡丅
SCL偲SDA儔僀儞偼10k兌偱僾儖傾僢僾偟偰偁傝傑偡丅
PIC16F873偵偼僴乕僪僂僃傾I2C偑撪憼偝傟偰偄傑偡偑丄婛偵LED儌僕儏乕儖梡偱億乕僩傪I/O僺儞偲偟偰 巊梡偟偰偄傞偺偱丄PORT A偺斈梡I/O億乕僩傪巊偄傑偟偨丅
PIC儅僀僐儞偼I2C偺儅僗僞乕偲側傞偨傔丄崅懍張棟傕昁梫偱偼側偄偺偱丄斈梡I/O億乕僩偱廫暘偱偡丅 傛偭偰丄PIC16F84偺傛偆偵僴乕僪僂僃傾I2C傪撪憼偟側偄PIC儅僀僐儞偱傕戝忎晇偱偡丅
壓偺幨恀偑丄愙懕偟偨忬懺偱偡丅

- 仠 僾儘僌儔儉
- 傑偢丄嵟弶偺僗僥僢僾偲偟偰丄PIC儅僀僐儞偐傜俠俥偵僨乕僞傪彂偒崬傔傞偙偲傪妋擣偡傞僾儘僌儔儉傪嶌惉偟傑偟偨丅
奐敪偵巊梡偟偨偺偼丄CCS C僐儞僷僀儔乕偱偡乮埖偄偼僨乕僞僟僀僫儈僋僗乯偱偡丅
CCS C僐儞僷僀儔乕偵偼僴乕僪僂僃傾I2C傪撪憼偟側偄応崌偱傕棙梡壜擻側I2C梡娭悢偑梡堄偝傟偰偄偰丄PIC儅僀僐儞偺 I2C僨僶僀僗奐敪偵偼偆偭偰偮偗偱偡丅
壓婰偼丄PIC16F873偺僞僀儅乕侾偺僨乕僞傪丄CF偵彂偒崬傓堊偺僾儘僌儔儉偱偡丅
俴俠俢儌僕儏乕儖傪僨僶僢僌梡偺昞帵僨僶僀僗偲偟偰巊梡偟偰偄傑偡偑丄UART(僔儕傾儖億乕僩乯傪巊偭偰 僷僜僐儞摍偵弌椡偟偰傕椙偄偲巚偄傑偡丅
偲偵偐偔丄僨僶僢僌梡偺昞帵僨僶僀僗偼丄奐敪梡偵偼寚偐偣傑偣傫丅
壓婰亂僾儘僌儔儉儕僗僩侾亃偼俠俥偵僨乕僞傪彂偒崬傓僥僗僩丅
亂僾儘僌儔儉儕僗僩俀亃偑壏搙丒幖搙傪昞帵媦傃應掕寢壥傪俠俥偵婰壇偡傞傕偺乮偲傝偁偊偢姰惉斉乯
亂僾儘僌儔儉儕僗僩侾亃
// FAT002 Test Program // By Yasuo Ikushima // // 栺3昩娫妘偱 TIME1 偺僇僂儞僩抣傪僥僉僗僩偱 TEST.TXT 僼傽僀儖偵彂偒崬傫偱偄偔 // // FAT002僕儍儞僷僺儞偺愝掕 // JP2 // 1-2 : 僔儑乕僩 // // JP3 // 2-3 : 僔儑乕僩 // 5-6 : 僔儑乕僩 // // JP5 // 1-2 : 僔儑乕僩 // 3-4 : 僔儑乕僩 #include <16F873.h> // Pointer size = 16bit #device adc=10 *=16 // Clock = 2MHz #use delay(clock=2000000) // Configuration Fuses #fuses XT, NOWDT, NOWRT,NOPROTECT, NOPUT, NOBROWNOUT, NOLVP, NOCPD // 儅僗僞乕儌乕僪偱巊梡丄撪憼I2C偼枹巊梡丄斈梡億乕僩傪I2C偱巊梡 #use I2C(master, sda=PIN_A1, scl=PIN_A0) // FAT002 偺I2C傾僪儗僗(屌掕) #define FATADR (0xa4) // 奺僺儞偺妱傝摉偰 // // I2C SCL #define USR_I2C_SCL PIN_A0 // I2C SDA #define USR_I2C_SDA PIN_A1 // I2C_DATARDY 偼 ALFAT僺儞斣崋19(FAT002婎斅偱偼 TTL-TXD) #define I2C_DATARDY PIN_A2 // // 偙偺僺儞偼 ALFAT偵弌椡僨乕僞偑巆偭偰偄傞応崌偵 1 偲側傞 // FAT002婎斅忋偺LED L3 // I2C_BUSY 偼 ALFAT僺儞斣崋21(FAT002婎斅偱偼 EXT-RXD) #define I2C_BUSY PIN_A3 // // 偙偺僺儞偼 ALFAT偑Busy偺帪偵 1 偲側傞 // FAT002婎斅忋偺LED L4 // LCD僷僱儖偺愝掕 // // LCD Control & Data signals line // RB2 : RS (Register select) // RB1 : R/W // RB0 : E (Enable signal) // // RC0 : DB0 // RC1 : DB1 // RC2 : DB2 // RC3 : DB3 // RC4 : DB4 // RC5 : DB5 // RC6 : DB6 // RC7 : DB7 // LCD Control Signals #define RS_LOW 0b000 #define RS_HIGH 0b100 #define RW_R 0b10 #define RW_W 0b00 #define E_LOW 0b0 #define E_HIGH 0b1 // PortA偼擖弌椡屌掕 #use fast_io(A) // Delay Time #define DLTIMEu 10 // 僶僢僼傽 char lbuf[21]; char sbuf[21]; // ack僔僌僫儖奿擺梡 int ansc; // ******************************* // LCD RS Line = Low, DATA Wite // ******************************* void LCD_RSLOW_RW(int lcd_data) { int8 i; i = lcd_data; output_c(i); i = RS_LOW + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); i = RS_LOW + RW_W + E_HIGH; output_b(i); delay_us(DLTIMEu); i = RS_LOW + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); } // ******************************* // LCD RS Line = High, DATA Wite // ******************************* void LCD_RSHI_RW(int lcd_data) { int8 i; i = lcd_data; output_c(i); i = RS_HIGH + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); i = RS_HIGH + RW_W + E_HIGH; output_b(i); delay_us(DLTIMEu); i = RS_HIGH + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); } // ******************************* // LCD Data output // ******************************* void LCD_Dataout(int8 i) { i += 0b10000000; LCD_RSLOW_RW(i); i = 0; while(lbuf[i] != 0) { LCD_RSHI_RW(lbuf[i]); i ++; } } // ******************************************************************* // ALFAT偐傜僨乕僞傪庢摼 // // I2C_DATARDY 傪僠僃僢僋偟偰丄 // ALFAT懁偵枹憲怣僨乕僞偑偁傞偲偒偼庢摼偟偨僨乕僞傪曉偡 // 枹憲怣僨乕僞偑柍偄応崌偼 0x100 傪曉偡 // ******************************************************************* long Get_I2C_Data() { long rd; if (input(I2C_DATARDY) == 1) { i2c_start(); // 儕乕僪帪偺傾僪儗僗偼 +1 偡傞 i2c_write(FATADR+1); rd= i2c_read(); i2c_stop(); } else { rd = 0x100; } return(rd); } // ******************************************************************* // ALFAT偵僨乕僞傪憲怣 // // 嵟弶偵丄ALFAT懁偵枹憲怣僨乕僞偑偁傞応崌偼丄慡偰撉傓 // // 師偵丄I2C_BUSY傪僠僃僢僋偟偰丄僨乕僞傪憲怣 // ******************************************************************* int Send_I2C_Data(int idata) { int rd; rd = 0; while(input(I2C_DATARDY) == 1) { i2c_start(); i2c_write(FATADR+1); rd = i2c_read(); i2c_stop(); } while(input(I2C_BUSY) == 1); i2c_start(); i2c_write(FATADR); i2c_write(idata); i2c_stop(); return(rd); } // ******************************************************************* // 暋悢僨乕僞偺憲怣傪峴偆 // // 憲怣曽朄偼 wmode 曄悢偱惂屼 // // wmode = 0 : sbuf偵奿擺偝傟偰偄傞僨乕僞傪0偵払偡傞傑偱憲怣 // 憲怣屻丄ALFAT懁偐傜偺僨乕僞傪庴怣 // I2C_DATARDY偑0偲側偭偨傜庴怣掆巭 // // wmode = 1 : 僼儗乕儉儌乕僪梡僨乕僞憲怣 // sbuf[0] 偺壓埵5價僢僩偵奿擺偝傟偰偄傞僨乕僞悢傪憲怣偟 // 僠僃僢僋僒儉傪寁嶼偟憲怣 // 憲怣屻丄ALFAT懁偐傜憲怣偝傟偰偒偨ACK僔僌僫儖偺愭摢Byte // 偺壓埵5價僢僩暘偺僨乕僞傪庴怣 // 忋埵3價僢僩偼ACK/NACK偺敾暿偵巊梡偡傞 // // wmode = 2 : sbuf偵奿擺偝傟偰偄傞僨乕僞傪0偵払偡傞傑偱憲怣 // 憲怣屻丄ALFAT懁偐傜憲怣偝傟偰偒偨ACK僔僌僫儖偺愭摢Byte // 偺壓埵5價僢僩暘偺僨乕僞傪庴怣 // 忋埵3價僢僩偼ACK/NACK偺敾暿偵巊梡偡傞 // // wmode = 3 : sbuf偵奿擺偝傟偰偄傞僨乕僞傪0偵払偡傞傑偱憲怣 // 庴怣偼柍偟 // // ******************************************************************* void SendLine_I2C_Data(int wmode) { int i; int j; int len; int accode; int acbyte; int csum; long rd; // 彂偒晹暘偼丄LCD偱ALFAT偐傜偺僔僌僫儖傪儌僯僞偡傞偨傔偺僐乕僪 // for (i = 0 ; i < 20 ; i ++) lbuf[i] = ' '; // lbuf[20] = 0; // LCD_Dataout(0x14); // delay_ms(100); // i = 0; // while((lbuf[i++] = Get_I2C_Data()) != 0); j = 0; csum = 0; // --------------------------------------------------------------- if (wmode == 1) { len = sbuf[0] & 0x1F; len ++; for (i = 0; i < len ; i++) { csum += sbuf[i]; Send_I2C_Data(sbuf[i]); } Send_I2C_Data(csum); while ((rd = Get_I2C_Data()) == 0x100); i = 0; acbyte = rd & 0x1F; accode = rd & 0xE0; lbuf[i] = rd; //rd; i ++; for (j = 0 ; j <= acbyte ; j ++) { lbuf[i] = Get_I2C_Data(); i ++; } // --------------------------------------------------------------- } else if (wmode == 2) { while(sbuf[j] != 0) { Send_I2C_Data(sbuf[j++]); } while ((rd = Get_I2C_Data()) == 0x100); i = 0; acbyte = rd & 0x1F; accode = rd & 0xE0; lbuf[i] = rd; //rd; i ++; for (j = 0 ; j <= acbyte ; j ++) { lbuf[i] = Get_I2C_Data(); i ++; } // --------------------------------------------------------------- } else if (wmode == 3) { while(sbuf[j] != 0) { Send_I2C_Data(sbuf[j++]); } // --------------------------------------------------------------- } else { while(sbuf[j] != 0) { Send_I2C_Data(sbuf[j++]); } i = 0; while((rd = Get_I2C_Data()) != 0x100) { lbuf[i] = rd; i ++; } } // 壓埵摦嶌偼 wmode = 3 埲奜偱峴偆 if (wmode != 3) { // ACK/NACK僔僌僫儖傪僌儘乕僶儖曄悢偵奿擺 ansc = lbuf[0]; // 埲壓偺晹暘偼丄LCD偵庴怣僨乕僞傪昞帵偡傞偨傔偺愝掕 // for (j = 0 ; j < i ; j ++) { // if (lbuf[j] < 0x20) lbuf[j] += 0xB0; // } // lbuf[i] = '<'; // lbuf[i+1] = 0; // LCD_Dataout(0x14); } } // ******************************* // main function // ******************************* void main() { int8 i; int rd; long tmr1; // ADC is not used. setup_adc_ports(NO_ANALOGS); setup_adc(ADC_OFF); //TIMER 1傪撪憼僋儘僢僋丄俉暘廃偱巊梡 setup_timer_1 ( T1_INTERNAL | T1_DIV_BY_8 ); // Port initial value output_a(0xFF); output_b(0xFF); output_c(0xFF); // All PORTB and PORTC are output. SET_TRIS_C( 0b00000000); SET_TRIS_B( 0b00000000); // Setting of PORTA // I2C晹暘偼擖椡偱屌掕 SET_TRIS_A( 0b001111 ); // ------------------------------- // LCD module 弶婜壔 // ------------------------------- delay_ms(50); LCD_RSLOW_RW(0b00110000); delay_ms(5); LCD_RSLOW_RW(0b00110000); delay_us(100); LCD_RSLOW_RW(0b00110000); // 8bit,1/16 duty LCD_RSLOW_RW(0b00111000); // Display ON(bit2 = 1),Cursor OFF(bit1 = 0),NO Blink(bit0 = 0) LCD_RSLOW_RW(0b00001100); // Display Clear LCD_RSLOW_RW(0b00000001); // Cursor Home LCD_RSLOW_RW(0b00000010); delay_ms(10); // ------------------------------- // LCD偵暥帤昞帵 // ------------------------------- // 1234567890 sprintf(lbuf,"FAT002 "); LCD_Dataout(0x00); // ------------------------------------------------------------------- // ALFAT 偼揹尮搳擖屻丄僽乕僩儘乕僟乕儌乕僪偵側傞偺偱 // 'BL' 偺儊僢僙乕僕傪僠僃僢僋 // ------------------------------------------------------------------- // 'B'偑棃傞傑偱庴怣傪懕偗傞 while(Get_I2C_Data() != 'B'); // 'B'偺師偼'L'偱偁傞偙偲傪妋擣 if (Get_I2C_Data() == 'L') { // LCD偵昞帵 // 1234567890 sprintf(lbuf,"BL OK! "); LCD_Dataout(0x0A); } else { // LCD偵僄儔乕昞帵 // 1234567890 sprintf(lbuf,"NG! Stop! "); LCD_Dataout(0x0A); // 僄儔乕偺応崌偼PIC傪僗儕乕僾 sleep(); } // 埲壓偺晹暘偼丄僼傽乕儉僂僃傾傪CF偵彂偒崬傫偱丄傾僢僾僨乕僩偡傞応崌偵 // 梡偄傞(CF 偺僪儔僀僽偼 B 僪儔僀僽偲側傞) // sprintf(sbuf,"LQUB"); // SendLine_I2C_Data(0); // // 壓婰晹暘偼丄500ms枅偵ALFAT偐傜憲怣偝傟傞僨乕僞傪僠僃僢僋偡傞傕偺 // ALFAT懁偐傜偼僼傽乕儉僂僃傾傾僢僾僨乕僩拞偵W01\n W02\n....W99\n // 偺傛偆偵恑捇忬嫷傪%偱弌椡偟偰偔傞 // // 彂崬傒偑姰椆偡傞偲丄庴怣僨乕僞偼0x00偲側傝丄LED3/LED4偑揰摍 // while(1) { // i = Get_I2C_Data(); // sprintf(lbuf,"%X:",i); // LCD_Dataout(0x54); // delay_ms(500); // } //while(1); // ------------------------------------------------------------------- // "BL"儊僢僙乕僕傪妋擣偟偨傜丄'R'僉儍儔僋僞傪憲怣 // ------------------------------------------------------------------- Send_I2C_Data('R'); // 壓婰晹暘偼丄R僉儍儔僋僞傪憲怣偟偰傕丄ALFAT偑"Z:/>"傪憲怣偟偰偙側偄 // 応崌偵丄僽乕僩儘乕僟乕偺僄儔乕傪LCD偵昞帵偝偣偰妋擣偡傞傕偺 // while(1) { // i = Get_I2C_Data(); // sprintf(lbuf,"%X:",i); // LCD_Dataout(0x54); // delay_ms(500); // } // ------------------------------------------------------------------- // 僽乕僩偑惓忢偵峴傢傟傞偲丄"GHI Electoro...(棯) Z:\> "傪憲怣偟偰偔傞 // 偺偱丄'>'傪僉儍僢僠偡傞 // ------------------------------------------------------------------- i = 0; while (Get_I2C_Data() != '>') { } // 僉儍僢僠偱偒偨傜丄LCD偵"Z:>"傪昞帵 sprintf(lbuf,"Z:>"); LCD_Dataout(0x0A); // 壓婰晹暘偼丄echo傪off偵偡傞偨傔偺傕偺 // 僼儗乕儉儌乕僪傪巊梡偡傞応崌偼晄梫 // sprintf(sbuf,"EE 0\n\r"); // SendLine_I2C_Data(0); // delay_ms(500); // delay_ms(500); // while(1); // 壓婰晹暘偼丄僼傽乕儉僂僃傾偺僶乕僕儑儞傪LCD偵昞帵偡傞偨傔偺傕偺 // delay_ms(500); // sprintf(sbuf,"VR\r"); // SendLine_I2C_Data(0); //while(1); // 偙偺僨傿儗乕偼丄LCD偺暥帤傪妋擣偡傞偨傔偺傕偺乮埲壓傕摨條) delay_ms(500); // ------------------------------------------------------------------- // 僼儗乕儉儌乕僪偵堏峴偡傞偨傔偺丄僐儅儞僪傪憲怣 // ------------------------------------------------------------------- sprintf(sbuf,"FM\r"); SendLine_I2C_Data(0); // 僨僶僢僌梡偺僽儗乕僋億僀儞僩 // while(1); // 壓婰晹暘偼丄擔晅偲帪崗傪愝掕偡傞傕偺 // delay_ms(500); // // 32384A8F // sprintf(sbuf,"\x85\x14\x8F\x4A\x38\x32"); // SendLine_I2C_Data(1); // if ((ansc & 0xE0) == 0x00) { // // 12345678901 // sprintf(lbuf,"T/D set er!"); // LCD_Dataout(0x54); // sleep(); // } else { // // 12345678901 // sprintf(lbuf,"T/D set ok!"); // LCD_Dataout(0x54); // } // ------------------------------------------------------------------- // FAT002婎斅偱偼CF偼'B'僪儔僀僽偵妱傝摉偰傜傟傞偺偱丄B僪儔僀僽偵堏摦 // ------------------------------------------------------------------- delay_ms(500); sprintf(sbuf,"\xE1B"); SendLine_I2C_Data(1); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"B: cmd er!"); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"B: cmd ok! "); LCD_Dataout(0x0A); } // 埲壓偺晹暘偼丄test.txt僼傽僀儖傪専嶕偟丄僼傽僀儖懏惈傪昞帵偡傞傕偺 // delay_ms(500); // sprintf(sbuf,"\x8A\x08test.txt\x00"); // SendLine_I2C_Data(1); // if ((ansc & 0xE0) == 0x00) { // // 12345678901 // sprintf(lbuf,"FI cmd er! "); // LCD_Dataout(0x54); // sleep(); // } else { // // 12345678901 // sprintf(lbuf,"FI cmd ok! "); // LCD_Dataout(0x54); // } //while(1); // ------------------------------------------------------------------- // 僼傽僀儖柤 test.txt傪彂崬傒儌乕僪偱怴婯嶌惉乮僼傽僀儖僴儞僪儖 0x01) // ------------------------------------------------------------------- delay_ms(500); sprintf(sbuf,"\x8C\x04\x77\x01test.txt\x00"); SendLine_I2C_Data(1); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"Open er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"Open OK! "); LCD_Dataout(0x0A); } // while(1); // ------------------------------------------------------------------- // 孞曉偟儖乕僾 // ------------------------------------------------------------------- Loop: // ------------------------------------------------------------------- // 僼傽僀儖僴儞僪儖 0x01偵丄6byte彂偒崬傓偙偲傪ALFAT偵抦傜偣傞 // ------------------------------------------------------------------- delay_ms(100); // 壓婰晹暘偺sprintf偼CCSC僐儞僷僀儔偱張棟偱偒側偐偭偨偨傔丄 // sbuf偵捈愙憓擖 // sprintf(sbuf,"\xC5\x08\0\0\0\x01"); sbuf[0] = 0xC5; sbuf[1] = 0x06; sbuf[2] = 0x00; sbuf[3] = 0x00; sbuf[4] = 0x00; sbuf[5] = 0x01; SendLine_I2C_Data(1); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"W cmd er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"W cmd ok! "); LCD_Dataout(0x0A); } // while(1); // ------------------------------------------------------------------- // ALFAT懁偐傜彂崬傒嫋壜偑偒偨傜丄僨乕僞6byte憲怣 // ------------------------------------------------------------------- delay_ms(100); // 掕悢偺応崌偼壓婰偺傛偆偵偟偰傕椙偄 // sprintf(sbuf,"54321\n"); // 僞僀儅侾偺僇僂儞僩抣傪5byte丄偦偟偰 \n 傪 sbuf 偵奿擺 tmr1 = get_timer1(); sprintf(sbuf,"%5Lu\n",tmr1); SendLine_I2C_Data(2); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"Write er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"Write ok! "); LCD_Dataout(0x0A); } // ------------------------------------------------------------------- // 彂偒崬傫偩傜丄ALFAT撪偺僶僢僼傽偵巆偭偰偄傞僨乕僞傪CF偵彂偒崬傓 // ------------------------------------------------------------------- delay_ms(100); sprintf(sbuf,"\x82\x0E\x01"); SendLine_I2C_Data(1); if ((ansc & 0xF0) == 0x00) { // 1234567890 sprintf(lbuf,"Flush er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"Flush OK! "); LCD_Dataout(0x0A); } // ------------------------------------------------------------------- // 栺2昩娫丄LCD偵"SLEEP"傪昞帵偝偣丄偙傟偑昞帵偝傟偰偄傞偲偒偵 // 揹尮傪愗傞偲丄僼傽僀儖傪夡偝側偄偐傕偟傟側偄 // ------------------------------------------------------------------- delay_ms(100); // 1234567890 sprintf(lbuf,"Sleep "); LCD_Dataout(0x0A); delay_ms(2000); // ------------------------------------------------------------------- // 埲屻孞曉偟 // ------------------------------------------------------------------- goto Loop; // while(1); // ------------------------------------------------------------------- // 壓婰晹暘偼丄僼傽僀儖傪僋儘乕僘偡傞応崌偺僐儅儞僪 // ------------------------------------------------------------------- // delay_ms(500); // sprintf(sbuf,"\x82\x05\x01"); // SendLine_I2C_Data(1); // if ((ansc & 0xF0) == 0x00) { // // 1234567890 // sprintf(lbuf,"Close er! "); // LCD_Dataout(0x0A); // sleep(); // } else { // // 1234567890 // sprintf(lbuf,"Close OK! "); // LCD_Dataout(0x0A); // } }
亂僾儘僌儔儉儕僗僩俀亃
忋婰丄儕僗僩侾偐傜梋暘側僐儊儞僩傪奜偟丄壏搙丒幖搙僙儞僒偺撉傒崬傒僾儘僌儔儉偲 僞僀儅侾丄壏搙丄幖搙傪俠俥偵彂偒崬傓僾儘僌儔儉傪捛壛偟傑偟偨丅
// FAT002 Test Program // By Yasuo Ikushima // // 栺3昩娫妘偱壏搙丒幖搙僙儞僒偵彂偒崬傫偱偄偔 // // FAT002僕儍儞僷僺儞偺愝掕 // JP2 // 1-2 : 僔儑乕僩 // // JP3 // 2-3 : 僔儑乕僩 // 5-6 : 僔儑乕僩 // // JP5 // 1-2 : 僔儑乕僩 // 3-4 : 僔儑乕僩 // ******************************************************************* #include <16F873.h> // Pointer size = 16bit #device adc=10 *=16 // Clock = 2MHz #use delay(clock=2000000) // Configuration Fuses #fuses XT, NOWDT, NOWRT,NOPROTECT, NOPUT, NOBROWNOUT, NOLVP, NOCPD // 儅僗僞乕儌乕僪偱巊梡丄撪憼I2C偼枹巊梡丄斈梡億乕僩傪I2C偱巊梡 #use I2C(master, sda=PIN_A1, scl=PIN_A0) // FAT002 偺I2C傾僪儗僗(屌掕) #define FATADR (0xa4) // 奺僺儞偺妱傝摉偰 // // I2C SCL #define USR_I2C_SCL PIN_A0 // I2C SDA #define USR_I2C_SDA PIN_A1 // I2C_DATARDY 偼 ALFAT僺儞斣崋19(FAT002婎斅偱偼 TTL-TXD) #define I2C_DATARDY PIN_A2 // // 偙偺僺儞偼 ALFAT偵弌椡僨乕僞偑巆偭偰偄傞応崌偵 1 偲側傞 // FAT002婎斅忋偺LED L3 // I2C_BUSY 偼 ALFAT僺儞斣崋21(FAT002婎斅偱偼 EXT-RXD) #define I2C_BUSY PIN_A3 // // 偙偺僺儞偼 ALFAT偑Busy偺帪偵 1 偲側傞 // FAT002婎斅忋偺LED L4 // ******************************************************************* // LCD僷僱儖偺愝掕 // // LCD Control & Data signals line // RB2 : RS (Register select) // RB1 : R/W // RB0 : E (Enable signal) // // RC0 : DB0 // RC1 : DB1 // RC2 : DB2 // RC3 : DB3 // RC4 : DB4 // RC5 : DB5 // RC6 : DB6 // RC7 : DB7 // LCD Control Signals #define RS_LOW 0b000 #define RS_HIGH 0b100 #define RW_R 0b10 #define RW_W 0b00 #define E_LOW 0b0 #define E_HIGH 0b1 // ******************************************************************* // CRC int8 crcdata; int8 const crc_table[256]= { 0, 49, 98, 83, 196, 245,166, 151,185, 136,219, 234,125, 76, 31, 46, 67, 114,33, 16, 135, 182,229, 212,250, 203,152, 169,62, 15, 92, 109,134, 183,228, 213,66, 115,32, 17, 63, 14, 93, 108,251, 202,153, 168,197, 244,167, 150,1, 48, 99, 82, 124, 77, 30, 47, 184, 137,218, 235,61, 12, 95, 110,249, 200,155, 170,132, 181,230, 215,64, 113,34, 19, 126, 79, 28, 45, 186, 139,216, 233,199, 246,165, 148,3, 50, 97, 80, 187, 138,217, 232, 127, 78, 29, 44, 2, 51, 96, 81, 198, 247,164, 149,248, 201,154, 171,60, 13, 94, 111, 65, 112,35, 18, 133, 180,231, 214,122, 75, 24, 41, 190, 143,220, 237,195, 242,161, 144, 7, 54, 101, 84, 57, 8, 91, 106,253, 204,159, 174,128, 177,226, 211,68, 117,38, 23, 252, 205,158, 175,56, 9, 90, 107,69, 116,39, 22, 129, 176,227, 210,191, 142,221, 236, 123, 74, 25, 40, 6, 55, 100, 85, 194, 243,160, 145,71, 118,37, 20, 131, 178,225, 208, 254, 207,156, 173,58, 11, 88, 105,4, 53, 102, 87, 192, 241,162, 147,189, 140,223, 238, 121, 72, 27, 42, 193, 240,163, 146,5, 52, 103, 86, 120, 73, 26, 43, 188, 141,222, 239, 130, 179,224, 209,70, 119,36, 21, 59, 10, 89, 104,255, 206,157, 172}; // LCD僷僱儖偺傾僪儗僗 // 1峴栚 : 0x00 - 0x13 // 2峴栚 : 0x40 - 0x53 // 3峴栚 : 0x14 - 0x27 // 4峴栚 : 0x54 - 0x67 // ******************************************************************* // PortA偼擖弌椡屌掕 #use fast_io(A) // Delay Time #define DLTIMEu 10 // 僶僢僼傽 char lbuf[21]; char sbuf[21]; // ack僔僌僫儖奿擺梡 int ansc; // 彂崬傒夞悢奿擺梡 long wcount; // ******************************************************************* // SHT1x Control signal // ******************************* // DATA Line = Low, SCK Line = Low // ******************************* void DL_SL() { output_a(0b001111); delay_us(DLTIMEu); } // ******************************* // DATA Line = High, SCK Line = Low // ******************************* void DH_SL() { output_a(0b011111); delay_us(DLTIMEu); } // ******************************* // DATA Line = Low, SCK Line = High // ******************************* void DL_SH() { output_a(0b101111); delay_us(DLTIMEu); } // ******************************* // DATA Line = High, SCK Line = High // ******************************* void DH_SH() { output_a(0b111111); delay_us(DLTIMEu); } // ******************************* // "Transmission Start" sequence // ******************************* void SHT_Trans_Start() { // PORTA initial value output_a(0xFF); SET_TRIS_A( 0b001111 ); // RA4 = output DH_SL(); DH_SH(); DL_SH(); DL_SL(); DL_SH(); DH_SH(); DH_SL(); // Wait delay_ms(10); } // ******************************* // LCD RS Line = Low, DATA Wite // ******************************* void LCD_RSLOW_RW(int lcd_data) { int8 i; i = lcd_data; output_c(i); i = RS_LOW + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); i = RS_LOW + RW_W + E_HIGH; output_b(i); delay_us(DLTIMEu); i = RS_LOW + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); } // ******************************* // LCD RS Line = High, DATA Wite // ******************************* void LCD_RSHI_RW(int lcd_data) { int8 i; i = lcd_data; output_c(i); i = RS_HIGH + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); i = RS_HIGH + RW_W + E_HIGH; output_b(i); delay_us(DLTIMEu); i = RS_HIGH + RW_W + E_LOW; output_b(i); delay_us(DLTIMEu); } // ******************************* // LCD Data output // ******************************* void LCD_Dataout(int8 i) { i += 0b10000000; LCD_RSLOW_RW(i); i = 0; while(lbuf[i] != 0) { LCD_RSHI_RW(lbuf[i]); i ++; } } // ******************************* // SHT Command transmission // ******************************* void SHT_Trans(int8 data) { int8 i; // crc crcdata = 0; crcdata ^= data; crcdata = crc_table[crcdata]; // Command transmission DH_SL(); for(i = 0 ; i < 8 ; i++) { if((data & 0b10000000) == 0) { DL_SL(); DL_SH(); DL_SL(); } else { DH_SL(); DH_SH(); DH_SL(); } data <<= 1; } // The ACK signal is received. SET_TRIS_A( 0b011111 ); // RA4 = input DH_SL(); DH_SH(); if (input(PIN_A4) == 1) { // Display Clear LCD_RSLOW_RW(0b00000001); // Cursor Home LCD_RSLOW_RW(0b00000010); delay_ms(10); // Error Message sprintf(lbuf,"ERROR;"); LCD_Dataout(0x00); sprintf(lbuf,"SHT does not respond"); LCD_Dataout(0x40); sprintf(lbuf," to the command."); LCD_Dataout(0x14); sleep(); } DH_SL(); } // ******************************* // SHT data recived // ******************************* int16 SHT_data_recive() { int8 rdata1,rdata2; int16 rdata; int8 i; int8 read_crc; // MSB 8bit of the temperature data is received. rdata1 = 0; for(i = 0 ; i < 8 ; i++) { DH_SH(); rdata1 <<= 1; if(input(PIN_A4) == 1) rdata1 ++; DH_SL(); } crcdata ^= rdata1; crcdata = crc_table[crcdata]; // The ACK signal is transmitted. SET_TRIS_A( 0b001111 ); // RA4 = output // ACK Puls DL_SL(); DL_SH(); DL_SL(); SET_TRIS_A( 0b011111 ); // RA4 = input // LSB 8bit of the temperature data is received. rdata2 = 0; for(i = 0 ; i < 8 ; i++) { DH_SH(); rdata2 <<= 1; if(input(PIN_A4) == 1) rdata2 ++; DH_SL(); } crcdata ^= rdata2; crcdata = crc_table[crcdata]; SET_TRIS_A( 0b001111 ); // RA4 = output // ACK Puls(CRC used) DL_SL(); DL_SH(); DL_SL(); // The CRC signal is received. SET_TRIS_A( 0b011111 ); // RA4 = input read_crc = 0; for(i = 0 ; i < 8 ; i ++) { DH_SH(); read_crc >>= 1; if(input(PIN_A4) == 1) read_crc += 0b10000000; DH_SL(); } DH_SL(); // ACK Puls DL_SL(); DH_SH(); DH_SL(); // CRC check if (crcdata != read_crc) { // Display Clear LCD_RSLOW_RW(0b00000001); // Cursor Home LCD_RSLOW_RW(0b00000010); delay_ms(10); // Error Message sprintf(lbuf,"ERROR;"); LCD_Dataout(0x00); sprintf(lbuf,"CRC Error!"); LCD_Dataout(0x40); sprintf(lbuf,"Calc CRC : %02X",crcdata); LCD_Dataout(0x14); sprintf(lbuf,"Read CRC : %02X",read_crc); LCD_Dataout(0x54); sleep(); } // MSB and LSB of the temperature data are stored in 16bit variable. rdata = (int16)rdata1*256 + (int16)rdata2; // Wait delay_ms(100); return(rdata); } // ******************************************************************* // ALFAT偐傜僨乕僞傪庢摼 // // I2C_DATARDY 傪僠僃僢僋偟偰丄 // ALFAT懁偵枹憲怣僨乕僞偑偁傞偲偒偼庢摼偟偨僨乕僞傪曉偡 // 枹憲怣僨乕僞偑柍偄応崌偼 0x100 傪曉偡 // ******************************************************************* long Get_I2C_Data() { long rd; if (input(I2C_DATARDY) == 1) { i2c_start(); // 儕乕僪帪偺傾僪儗僗偼 +1 偡傞 i2c_write(FATADR+1); rd= i2c_read(); i2c_stop(); } else { rd = 0x100; } return(rd); } // ******************************************************************* // ALFAT偵僨乕僞傪憲怣 // // 嵟弶偵丄ALFAT懁偵枹憲怣僨乕僞偑偁傞応崌偼丄慡偰撉傓 // // 師偵丄I2C_BUSY傪僠僃僢僋偟偰丄僨乕僞傪憲怣 // ******************************************************************* int Send_I2C_Data(int idata) { int rd; rd = 0; while(input(I2C_DATARDY) == 1) { i2c_start(); i2c_write(FATADR+1); rd = i2c_read(); i2c_stop(); } while(input(I2C_BUSY) == 1); i2c_start(); i2c_write(FATADR); i2c_write(idata); i2c_stop(); return(rd); } // ******************************************************************* // 暋悢僨乕僞偺憲怣傪峴偆 // // 憲怣曽朄偼 wmode 曄悢偱惂屼 // // wmode = 0 : sbuf偵奿擺偝傟偰偄傞僨乕僞傪0偵払偡傞傑偱憲怣 // 憲怣屻丄ALFAT懁偐傜偺僨乕僞傪庴怣 // I2C_DATARDY偑0偲側偭偨傜庴怣掆巭 // // wmode = 1 : 僼儗乕儉儌乕僪梡僨乕僞憲怣 // sbuf[0] 偺壓埵5價僢僩偵奿擺偝傟偰偄傞僨乕僞悢傪憲怣偟 // 僠僃僢僋僒儉傪寁嶼偟憲怣 // 憲怣屻丄ALFAT懁偐傜憲怣偝傟偰偒偨ACK僔僌僫儖偺愭摢Byte // 偺壓埵5價僢僩暘偺僨乕僞傪庴怣 // 忋埵3價僢僩偼ACK/NACK偺敾暿偵巊梡偡傞 // // wmode = 2 : sbuf偵奿擺偝傟偰偄傞僨乕僞傪0偵払偡傞傑偱憲怣 // 憲怣屻丄ALFAT懁偐傜憲怣偝傟偰偒偨ACK僔僌僫儖偺愭摢Byte // 偺壓埵5價僢僩暘偺僨乕僞傪庴怣 // 忋埵3價僢僩偼ACK/NACK偺敾暿偵巊梡偡傞 // // wmode = 3 : sbuf偵奿擺偝傟偰偄傞僨乕僞傪0偵払偡傞傑偱憲怣 // 庴怣偼柍偟 // // ******************************************************************* void SendLine_I2C_Data(int wmode) { int i; int j; int len; int accode; int acbyte; int csum; long rd; // 彂偒晹暘偼丄LCD偱ALFAT偐傜偺僔僌僫儖傪儌僯僞偡傞偨傔偺僐乕僪 // for (i = 0 ; i < 20 ; i ++) lbuf[i] = ' '; // lbuf[20] = 0; // LCD_Dataout(0x14); // delay_ms(100); // i = 0; // while((lbuf[i++] = Get_I2C_Data()) != 0); j = 0; csum = 0; // --------------------------------------------------------------- if (wmode == 1) { len = sbuf[0] & 0x1F; len ++; for (i = 0; i < len ; i++) { csum += sbuf[i]; Send_I2C_Data(sbuf[i]); } Send_I2C_Data(csum); while ((rd = Get_I2C_Data()) == 0x100); i = 0; acbyte = rd & 0x1F; accode = rd & 0xE0; lbuf[i] = rd; //rd; i ++; for (j = 0 ; j <= acbyte ; j ++) { lbuf[i] = Get_I2C_Data(); i ++; } // --------------------------------------------------------------- } else if (wmode == 2) { while(sbuf[j] != 0) { Send_I2C_Data(sbuf[j++]); } while ((rd = Get_I2C_Data()) == 0x100); i = 0; acbyte = rd & 0x1F; accode = rd & 0xE0; lbuf[i] = rd; //rd; i ++; for (j = 0 ; j <= acbyte ; j ++) { lbuf[i] = Get_I2C_Data(); i ++; } // --------------------------------------------------------------- } else if (wmode == 3) { while(sbuf[j] != 0) { Send_I2C_Data(sbuf[j++]); } // --------------------------------------------------------------- } else { while(sbuf[j] != 0) { Send_I2C_Data(sbuf[j++]); } i = 0; while((rd = Get_I2C_Data()) != 0x100) { lbuf[i] = rd; i ++; } } // 壓埵摦嶌偼 wmode = 3 埲奜偱峴偆 if (wmode != 3) { // ACK/NACK僔僌僫儖傪僌儘乕僶儖曄悢偵奿擺 ansc = lbuf[0]; // 埲壓偺晹暘偼丄LCD偵庴怣僨乕僞傪昞帵偡傞偨傔偺愝掕 // for (j = 0 ; j < i ; j ++) { // if (lbuf[j] < 0x20) lbuf[j] += 0xB0; // } // lbuf[i] = '<'; // lbuf[i+1] = 0; // LCD_Dataout(0x14); } } // ******************************* // main function // ******************************* void main() { int8 i; int rd; long tmr1; float tval; float rhval; float x; int16 rdata; // ADC is not used. setup_adc_ports(NO_ANALOGS); setup_adc(ADC_OFF); //TIMER 1傪撪憼僋儘僢僋丄俉暘廃偱巊梡 setup_timer_1 ( T1_INTERNAL | T1_DIV_BY_8 ); // Port initial value output_a(0xFF); output_b(0xFF); output_c(0xFF); // All PORTB and PORTC are output. SET_TRIS_C( 0b00000000); SET_TRIS_B( 0b00000000); // Setting of PORTA // I2C晹暘偼擖椡偱屌掕 SET_TRIS_A( 0b001111 ); // 彂崬傒夞悢弶婜壔 wcount = 0; // ------------------------------- // LCD module 弶婜壔 // ------------------------------- delay_ms(50); LCD_RSLOW_RW(0b00110000); delay_ms(5); LCD_RSLOW_RW(0b00110000); delay_us(100); LCD_RSLOW_RW(0b00110000); // 8bit,1/16 duty LCD_RSLOW_RW(0b00111000); // Display ON(bit2 = 1),Cursor OFF(bit1 = 0),NO Blink(bit0 = 0) LCD_RSLOW_RW(0b00001100); // Display Clear LCD_RSLOW_RW(0b00000001); // Cursor Home LCD_RSLOW_RW(0b00000010); delay_ms(10); // ------------------------------- // LCD偵暥帤昞帵 // ------------------------------- // 1234567890 sprintf(lbuf,"FAT002 "); LCD_Dataout(0x00); // ------------------------------------------------------------------- // ALFAT 偼揹尮搳擖屻丄僽乕僩儘乕僟乕儌乕僪偵側傞偺偱 // 'BL' 偺儊僢僙乕僕傪僠僃僢僋 // ------------------------------------------------------------------- // 'B'偑棃傞傑偱庴怣傪懕偗傞 while(Get_I2C_Data() != 'B'); // 'B'偺師偼'L'偱偁傞偙偲傪妋擣 if (Get_I2C_Data() == 'L') { // LCD偵昞帵 // 1234567890 sprintf(lbuf,"BL OK! "); LCD_Dataout(0x0A); } else { // LCD偵僄儔乕昞帵 // 1234567890 sprintf(lbuf,"NG! Stop! "); LCD_Dataout(0x0A); // 僄儔乕偺応崌偼PIC傪僗儕乕僾 sleep(); } // ------------------------------------------------------------------- // "BL"儊僢僙乕僕傪妋擣偟偨傜丄'R'僉儍儔僋僞傪憲怣 // ------------------------------------------------------------------- Send_I2C_Data('R'); // ------------------------------------------------------------------- // 僽乕僩偑惓忢偵峴傢傟傞偲丄"GHI Electoro...(棯) Z:\> "傪憲怣偟偰偔傞 // 偺偱丄'>'傪僉儍僢僠偡傞 // ------------------------------------------------------------------- i = 0; while (Get_I2C_Data() != '>') { } // 僉儍僢僠偱偒偨傜丄LCD偵"Z:>"傪昞帵 sprintf(lbuf,"Z:>"); LCD_Dataout(0x0A); // 偙偺僨傿儗乕偼丄LCD偺暥帤傪妋擣偡傞偨傔偺傕偺乮埲壓傕摨條) delay_ms(500); // ------------------------------------------------------------------- // 僼儗乕儉儌乕僪偵堏峴偡傞偨傔偺丄僐儅儞僪傪憲怣 // ------------------------------------------------------------------- sprintf(sbuf,"FM\r"); SendLine_I2C_Data(0); // ------------------------------------------------------------------- // FAT002婎斅偱偼CF偼'B'僪儔僀僽偵妱傝摉偰傜傟傞偺偱丄B僪儔僀僽偵堏摦 // ------------------------------------------------------------------- delay_ms(500); sprintf(sbuf,"\xE1B"); SendLine_I2C_Data(1); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"B: cmd er!"); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"B: cmd ok! "); LCD_Dataout(0x0A); } // ------------------------------------------------------------------- // 僼傽僀儖柤 mes.dat傪彂崬傒儌乕僪偱怴婯嶌惉乮僼傽僀儖僴儞僪儖 0x01) // ------------------------------------------------------------------- delay_ms(500); sprintf(sbuf,"\x8B\x04\x77\x01mes.dat\x00"); SendLine_I2C_Data(1); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"Open er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"Open OK! "); LCD_Dataout(0x0A); } // while(1); // ------------------------------------------------------------------- // 孞曉偟儖乕僾 // ------------------------------------------------------------------- Loop: // "Transmission Start" sequence SHT_Trans_Start(); // ******************************* // Temperature measurement command // ******************************* SHT_Trans(0b00000011); // Command transmission // SHT Time to measure temperature by 14bit accuracy // 210ms * 1.15 = 315ms delay_ms(210); // End Conversion check while(input(PIN_A4) == 1); // SHT data recived rdata = SHT_data_recive(); // Temperature = d1 + d2 x rdata // d1 = -40 (VDD = 5V), d2 = 0.01 (14bit) tval = (float)rdata * 0.01 - 40.0; // "Transmission Start" sequence SHT_Trans_Start(); // ******************************* // Humidity measurement command // ******************************* SHT_Trans(0b00000101); // Command transmission // Time to measure temperature by 12bit accuracy // 55ms delay_ms(210); // End Conversion check while(input(PIN_A4) == 1); // SHT data recived rdata = SHT_data_recive(); // RH = C1 + C2 x rdata + C3 x rdata x rdata x = (float)rdata; rhval = -4 + 0.0405 * x - 0.0000028 * x * x; // ******************************* // DATA output // ******************************* // Temperature output i = 0xDF; // 2峴栚偵壏搙昞帵 sprintf(lbuf,"Tmp = %5.1f (%CC)",tval,i); // Data output LCD_Dataout(0x40); // Humidity is written in the third line. sprintf(lbuf,"RH = %5.1f (%%)",rhval); // 3峴栚偵幖搙昞帵 LCD_Dataout(0x14); // 4峴栚偵彂崬傒夞悢傪昞帵 wcount ++; sprintf(lbuf,"Write Cnt. = %5Lu",wcount); LCD_Dataout(0x54); // ------------------------------------------------------------------- // 僞僀儅侾偺僇僂儞僩抣傪庢摼 // ------------------------------------------------------------------- tmr1 = get_timer1(); // ------------------------------------------------------------------- // 僼傽僀儖僴儞僪儖 0x01偵丄19byte彂偒崬傓偙偲傪ALFAT偵抦傜偣傞 // ------------------------------------------------------------------- delay_ms(100); // 壓婰晹暘偺sprintf偼CCSC僐儞僷僀儔偱張棟偱偒側偐偭偨偨傔丄 // sbuf偵捈愙憓擖 // sprintf(sbuf,"\xC5\x13\0\0\0\x01"); sbuf[0] = 0xC5; sbuf[1] = 0x13; sbuf[2] = 0x00; sbuf[3] = 0x00; sbuf[4] = 0x00; sbuf[5] = 0x01; SendLine_I2C_Data(1); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"W cmd er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"W cmd ok! "); LCD_Dataout(0x0A); } // while(1); // ------------------------------------------------------------------- // 俠俥偵曐懚偡傞僨乕僞 // ------------------------------------------------------------------- sprintf(sbuf,"%5Lu %5.1f %5.1f\r\n",tmr1,tval,rhval); // Byte悢 // "%5Lu " : 6byte // "%5.1lf " : 6byte // "%5.1lf" : 5byte // "\r\n" : 2byte // 寁 19byte // ------------------------------------------------------------------- // ALFAT懁偐傜彂崬傒嫋壜偑偒偨傜丄僨乕僞傪憲怣 // ------------------------------------------------------------------- delay_ms(100); SendLine_I2C_Data(2); if ((ansc & 0xE0) == 0x00) { // 1234567890 sprintf(lbuf,"Write er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"Write ok! "); LCD_Dataout(0x0A); } // ------------------------------------------------------------------- // 彂偒崬傫偩傜丄ALFAT撪偺僶僢僼傽偵巆偭偰偄傞僨乕僞傪CF偵彂偒崬傓 // ------------------------------------------------------------------- delay_ms(100); sprintf(sbuf,"\x82\x0E\x01"); SendLine_I2C_Data(1); if ((ansc & 0xF0) == 0x00) { // 1234567890 sprintf(lbuf,"Flush er! "); LCD_Dataout(0x0A); sleep(); } else { // 1234567890 sprintf(lbuf,"Flush OK! "); LCD_Dataout(0x0A); } // ------------------------------------------------------------------- // 栺2昩娫丄LCD偵"SLEEP"傪昞帵偝偣丄偙傟偑昞帵偝傟偰偄傞偲偒偵 // 揹尮傪愗傞偲丄僼傽僀儖傪夡偝側偄偐傕偟傟側偄 // ------------------------------------------------------------------- delay_ms(100); // 1234567890 sprintf(lbuf,"Sleep "); LCD_Dataout(0x0A); delay_ms(2000); // ------------------------------------------------------------------- // 埲屻孞曉偟 // ------------------------------------------------------------------- goto Loop; }